
Universal Robots Vision System Monitors Stock Levels for CNC Tending Robot
To improve the dental crown milling method at Glidewell Laboratories, in-house engineers have established their own, low-cost, machine vision system. With the goal of refining productivity, the machine vision system monitors stock levels of 16 shades of blanks that are used for machining the crowns and to sense dispenser jams while supporting a robot in tending four Computer Numerical Control (CNC) machines.
During the procedure, a UR5 robot from Universal Robots selects a crown to be milled from bins with partially-sintered blanks. After picking the blank out of the dispenser, the robot presents it to a barcode reader linked to a standard Windows PC cell controller.
The scanner reads a 2D matrix code that contains a shade gauge, a shrinkage factor and a serial number that is used to allocate the specific patient data to the block serial number and guarantee that the crown goes to the right patient.
If for some reason the shade indicated by the barcode is inaccurate, the PC signals the UR5 robot through a microcontroller board handling CNC cell I/O to discard the blank and move it to a conveyor. If the shade is accurate, the robot proceeds to place the blank in the mill, where the system uses the shrinkage factor to widen the NC program just enough to ensure that the crown turns out the correct size. After the 10-minute cycle, the robot takes the machined crown from the CNC and moves it to a conveyor.

| Glidewell Laboratories utilizes more than a dozen UR5 robots with a machine vision system to oversee stock levels and discover dispenser jams while assisting each robot in tending four CNC milling machines. |
The machine vision system monitors the 16 shades of blanks used for the machining the crowns. If the dispenser is empty or jammed, the operator receives a notification of issue. In the meantime, the UR5 is directed to carry out the next order to achieve continuous operation.
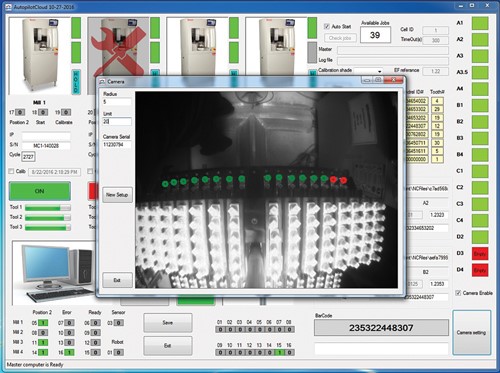
Glidewell engineer Babak Manafighazan developed the machine vision application and a user interface that allows operators to define separate regions around the blocks in the rack within the camera view on the monitor. To monitor for block presence, the software calculates and averages pixel contrast values for each area of interest, which represents one shade in the rack. During operation, the software continuously performs the same calculation as images are acquired and compares contrast values to the original saved values defined by the operator during setup. If there is a difference, the system notifies the operator that a block is jammed or not present.
"By notifying the operator to intervene or reload material when a particular shade is running low or has been exhausted," explains David Leeson, engineering director at Glidewell, "the vision system allows the robot to continue loading blanks for crowns that can be made with the remaining shades available to ensure continued production while waiting for the stock to be replenished."
| The machine vision system monitors the 16 different shades of blanks used for the crowns. If a dispenser is empty or jammed, the operator is alerted to fix the issues. |
To acquire the image of the dispenser rack with different shade blanks, the vision system relies on a Chameleon 1.3 MP monochrome USB 2.0 camera. The camera has a global shutter CCD with a resolution of 1296 x 964, a 1/3" sensor format and a pixel size of 3.75 μm.
Paired with a lens, the camera achieves a field of view large enough for the final four blocks of each shade in each slot to be counted. After the digital image data is transferred to the PC via a standard USB 2.0 cable, the vision application analyzes the image to determine if any particular shade has four blanks or less remaining.
he machine vision
system software programming is all home grown and written in C# using the Open
Source Computer Vision Library (Open CV; http://opencv.org), according to
Leeson. "Although it takes more work it dramatically reduces the cost over
a turnkey solution and lets us use vision more liberally. This is a relatively
simple vision system application for us so there weren't too many challenges.
One thing we found necessary later was to change the material rack color by
using black material instead of white to give us better contrast in a variety
of lighting conditions.
"
Recent Posts
-

Best Methods for Connecting Older Devices and Machines for Data Analysis
In today's rapidly advancing technological landscape, data analysis has become a cornerstone for inf …May 6th 2024 -
Introducing the Turck Q130 HF Read/Write Head: Revolutionizing RFID Data Management
In today's fast-paced industrial landscape, efficiency and accuracy are paramount. The ability to se …Apr 30th 2024 -
Using Scan Tunnels to Track, Sort and Route Warehouse Packages
If you’re using conveyor lines to move products, packages and shipments through your warehouse, the …Apr 17th 2024


